16-889: Assignment 5
Adnan Ahmad
Late Days used - 2
Task 1 – PointNet Classification
PointNet
Classification Test Accuracy = 96.85
Good Examples
|
Point Cloud |
Predicted Class |
|
|
|
|
|
Chair |
|
|
|
|
|
Vase |
|
|
|
|
|
Lamp |
|
|
|


Failure Cases - Classification
|
Point Clouds |
GT |
Predicted |
|
|
Vase |
Lamp |
|
|
|
|
|
|
Lamp |
Vase |
|
|
|
|
|
|
Vase |
Lamp |
|
|
|
|
Comments - The
results above indicate that the model achieves excellent classification performance
by obtaining 97% accuracy. The few cases where it fails have been visualized
above. These cases in general seem very hard to classify, even perhaps for most
humans. For instance, the second input looks very much like a vase and not a
lamp. It’s the same for the other 2 failed cases. Therefore, it can be concluded
that the model performs acceptably and only fails in extremely hard to classify
cases.
Task 2 – PointNet Segmentation Model
Segmentation Test
accuracy = 89.61
Good Examples
|
GT |
Predicted |
Accuracy |
|
|
|
|
|
|
|
99.63 |
|
|
|
|
|
|
|
82.03 |
|
|
|
|
|
|
|
99.18 |
|
|
|
|
Failure Cases – Segmentation
|
GT |
Pred |
Accuracy |
|
|
|
|
|
|
|
53.27 |
|
|
|
|
|
|
|
64.37 |
|
|
|
|
|
|
|
63.68 |
Comments – The pointnet segmentation model achieves 89.6% accuracy on the
test set which indicates good performance. The few failure cases have been visualized
above. It seems the model fails in cases where different regions of the chair blend
into each other without much semantic differentiation. This is clearly in the
last example, where the base of the chair merges into the foot, confusing the
model. The other 2 cases suffer from a similar problem. Overall, the model
still performs really well on most cases as shown by the
correctly visualized samples.
Task 3 - Robustness
|
|
Classification |
Segmentation |
Comments |
|
|
|
|
|
|
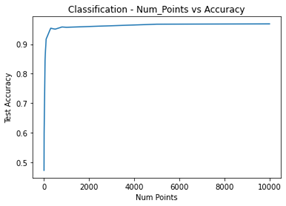
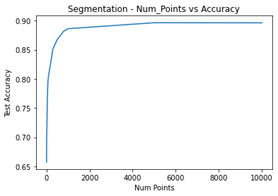
Num Points |
|
|
For both the classification and
segmentation models I varied the number of points over a large set starting
from (0,10000]. I then plotted the test accuracies. My observation is that the accuracy
drops significantly for both models if the num of points is extremely less (<50).
After that, the accuracy rises and saturates and more or less remains the
same, to the effect that adding more points doesn’t yield a noticeable
increase in accuracy. |
|
|
|
|
|
|
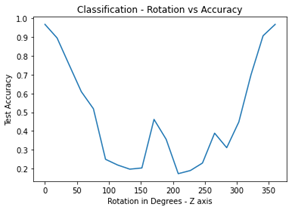
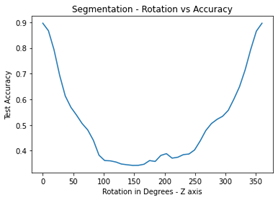
Rotation Angle |
|
|
For both the classification and
segmentation models I rotated the point cloud about the z-axis between [0,360]
degrees. For each of these angles I created a rotation matrix using scipy,
and took its dot product with the point cloud. I plotted the results vs test
accuacy. My observation is that accuracy
drops significantly as the model is rotated from its base configuration. This
continues until it starts rising again after it starts turning around into its
default config (~250 degrees). These plots suggest that the pointnet model is
NOT invariant to rotaions and hence additional modifications
are required to account for that. |
|
|
|
|
|